Moduly:
SAMS (Symbolická Analýza Mechanických Systémů)
SAMS / Suspension kinematics
SAMS / Vehicle steady states
Modely sestavené v prostředí Matab/Simulink+Simmechanics
Data Analysis
Trajectory
SADT - System of Automotive Development Tools je systém nástrojů zaměřených na podporu konstrukčního návrhu vozidla, analýzy jízdních stavů (vypočtených i měřených) a optimalizace kinematických i dynamických vlastnosti zavěšení kol a subsystémů vozidel ovlivňující jízdní vlastnosti automobilů.
Systém je budován jako interaktivní otevřený systém propojující jednotlivé nástroje (vytvořené na pracovišti nebo komerční moduly). Integrujícím prostředím je prostředí software Matlab.
Charakteristické vlastnosti:
-
Systém je budován hierarchicky: Obsahuje modely různé úrovně od nejjednodušších až po složité s návazností vstupních dat. Složité modely využívají hodnoty parametrů z jednodušších modelů jako východisko pro sestavení dat složitější struktury. Naopak jednodušší modely využívají data ze složitějších modelů.
-
Jednotlivé modely a submodely jsou využívány v různých etapách vývoje vozidla a v různých typech nástrojů (např. jak v simulačních výpočtech, tak v nástrojích pro analýzu dat)
-
Výstupní veličiny
-
ISO 8855 a SAE J670e
-
Speciální výstupy: Kombinující data měřená a vypočtená na základě modelů vozidla nebo jeho subsystémů
-
Nástroje podporující „racionální set-up“
Jednotlivé prvky systému jsou:
SAMS (Symbolická Analýza Mechanických Systémů)
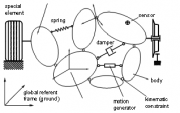 Multibody software SAMS slouží k vytvoření matematických modelů obecných mechanických systémů. Na základě zadané topologie mechanického systému program sestaví rovnice pro zadaný typ úlohy v syntaxi programovacího jazyka C, C++. Obecná část programu je rozšířená pro využití v oblasti jízdních vlastností vozidel. Multibody software SAMS slouží k vytvoření matematických modelů obecných mechanických systémů. Na základě zadané topologie mechanického systému program sestaví rovnice pro zadaný typ úlohy v syntaxi programovacího jazyka C, C++. Obecná část programu je rozšířená pro využití v oblasti jízdních vlastností vozidel.
Tento software je jedním ze základních prvků systému SADT, jelikož tvoří jádro řady dalších modulů systému. Umožňuje rychle sestavit rovnice pro řešení řady speciální úloh v oblasti jízdních vlastností vozu, od kinematiky zavěšení kol až po plnou dynamiku vozidla. Software umožňuje sestavit rovnice i pro problémy kombinující přímé i inversní úlohy. Systém je vhodný vzhledem ke svému obecnému základu k řešení úloh i mimo oblast dynamiky vozidel.
Autor software: Ing. Petr Porteš, Ph.D.
Charakteristika
SAMS / Suspension kinematics
Program slouží k optimalizaci kinematických vlastností náprav. Je určen jak pro vývoj nového zavěšení vozu, tak i pro optimalizaci již existující nápravy pomocí seřizovacích prvků, které jsou na nápravě k dispozici (podložky, velikost vyšroubování či zašroubování kloubů zavěšení, polohy přírub …). Parametry získané z tohoto modulu slouží jako vstupní parametry do dalších modulů systému SADT.
Matematický popis náprav se sestavuje programem SAMS, který vygeneruje rovnice pro jakýkoliv typ náprav. Proto není výběr omezen jen na několik předdefinovaných typů zavěšení, jak tomu bývá u jiných programů. Vzhledem k tomu, že rovnice jsou generovány, lze jejich strukturu přizpůsobit vstupním údajům, které jsou k dispozici.
 Software počítá prakticky všechny používané kinematické charakteristiky náprav. Model nápravy zahrnuje i mechanismus odpružení kol (např. push-rod, mechanismus stabilizátoru), proto poskytuje i všechny důležité převody sil, momentů a tuhostí (např. „síla na kole/síla na pružině“, „síla na kole/moment na stabilizátoru“, klopná tuhost zavěšení). Software počítá prakticky všechny používané kinematické charakteristiky náprav. Model nápravy zahrnuje i mechanismus odpružení kol (např. push-rod, mechanismus stabilizátoru), proto poskytuje i všechny důležité převody sil, momentů a tuhostí (např. „síla na kole/síla na pružině“, „síla na kole/moment na stabilizátoru“, klopná tuhost zavěšení).
Software je vybaven speciálním algoritmem pro optimalizaci náprav. Jednotlivé kinematické charakteristiky jsou v programu rozděleny do 3 skupin, podle požadavků na vlastnosti, které mají být výpočtem dosaženy. První skupinu tvoří kinematické veličiny, u nichž je kladen požadavek na jejich hodnotu v jednom pracovním bodě (nejčastěji v základní výškové poloze, např. sbíhavost, odklon kola, rozchod, výška středu klopení, anti-dive atd. v pracovní výšce vozu). Druhou skupinu tvoří kinematické charakteristiky, u nichž je optimalizován celý průběh závislosti na zdvihu kola, např. bump-steer (natočení kola v celém rozsahu zdvihu kola). Třetí skupinu tvoří kinematické charakteristiky, na něž není přímo kladen konkrétní požadavek, který má být dosažen výpočtem, ale přesto jsou vypočteny, aby bylo možné zkontrolovat, zda nevykazují nějakou nežádoucí abnormalitu, jež by znehodnocovala výsledky optimalizačních výpočtů.
Optimalizační výpočty jsou velmi rychlé a program může sloužit i k výpočtu nového nastavení náprav (setupu) mezi jednotlivými testovacími jízdami. Program svými vlastnostmi podporuje „racionální setup“.
Software je stále doplňován o další navazující analýzy poskytující důležité informace pro optimalizaci kinematických charakteristik. Rozšiřují se i možnosti vzájemného propojení s dalšími moduly systému SADT.
Autor software: Ing. Petr Porteš, Ph.D.
Charakteristika
SAMS / Vehicle steady states
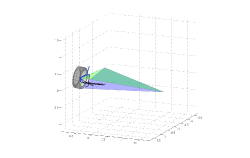
Program slouží k analýze ustálených a kvazi-ustálených stavů vozidla. Je určen pro vývoj a nastavení zavěšení vozu, odpružení vozidla i dalších subsystémů ovlivňujících ovladatelnost vozu jako jsou např. nápravové i mezinápravové diferenciály, aerodynamika vozu. Hierarchicky navazuje na modul SAMS/Suspension kinematics. Předpokládá se využití modelů a parametrů zavěšení vytvořených, analyzovaných a optimalizovaných v software ve zmíněném modulu. Model celého vozidla se opět vytváří softwarem SAMS, proto struktura modelovaného mechanismu může odpovídat libovolnému typu náprav, mechanismů odpružení vozu, silových prvků, seřizovacích prvků, atd., a požadované struktuře vstupních parametrů.
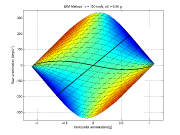 Program počítá ustálené stavy (např. jízda po kruhové dráze konstantní rychlostí) a kvaziustálené stavů (jízda po kruhové dráze včetně akcelerace nebo brzdění). Program rovněž počítá jednotlivé stavy pro Moment Method. Na základě těchto výpočtů je možné zjistit a pochopit jak se vozidlo chová a to i v mezních podmínkách (na hranici adheze), jaký vliv na chování vozu, jeho řiditelnost a stabilitu mají jednotlivé subsystémy vozidla či různá nastavení podvozku. Rovněž lze řešit i inverzní úlohy a tím i úlohy typu, jak se má změnit tuhost, nebo předpětí pružin, stabilizátorů, aby byla dosažena požadovaná poloha karosérie vůči vozovce. Vhledem k tomu, že velikost aerodynamických sil je u závodních vozů velmi závislá právě na poloze karosérie vůči vozovce, jedná se o užitečné výpočty pro tuto kategorii vozidel. Model vozidla je doplněn o model diferenciálů, což umožňuje analyzovat vliv parametrů svorných pasivních nebo aktivních diferenciálů i řídících diferenciálů (Torque Vectoring) předepisováním požadavků na uhlové rychlosti hřídelů nebo momentů působících na jednotlivé hřídele diferenciálů. Tyto analýzy lze provádět jak pro vozidlo s jednou hnací nápravou, tak i pro pohon 4x4 s nebo bez mezinápravového diferenciálu. Program počítá ustálené stavy (např. jízda po kruhové dráze konstantní rychlostí) a kvaziustálené stavů (jízda po kruhové dráze včetně akcelerace nebo brzdění). Program rovněž počítá jednotlivé stavy pro Moment Method. Na základě těchto výpočtů je možné zjistit a pochopit jak se vozidlo chová a to i v mezních podmínkách (na hranici adheze), jaký vliv na chování vozu, jeho řiditelnost a stabilitu mají jednotlivé subsystémy vozidla či různá nastavení podvozku. Rovněž lze řešit i inverzní úlohy a tím i úlohy typu, jak se má změnit tuhost, nebo předpětí pružin, stabilizátorů, aby byla dosažena požadovaná poloha karosérie vůči vozovce. Vhledem k tomu, že velikost aerodynamických sil je u závodních vozů velmi závislá právě na poloze karosérie vůči vozovce, jedná se o užitečné výpočty pro tuto kategorii vozidel. Model vozidla je doplněn o model diferenciálů, což umožňuje analyzovat vliv parametrů svorných pasivních nebo aktivních diferenciálů i řídících diferenciálů (Torque Vectoring) předepisováním požadavků na uhlové rychlosti hřídelů nebo momentů působících na jednotlivé hřídele diferenciálů. Tyto analýzy lze provádět jak pro vozidlo s jednou hnací nápravou, tak i pro pohon 4x4 s nebo bez mezinápravového diferenciálu.
Výstupy z programu jsou navrhovány tak, aby poskytly co nejnázorněji obraz stavu vozidla jako celku, ale i stavu jednotlivých subsystémů vozidla. Například stav pneumatiky je zachycen na několika grafech poskytujících informace typu:
- Na kolik je využíván maximální potenciál jednotlivých pneumatik, zda je skluz (podélný nebo příčný) pneumatiky nižší než hodnota odpovídající maximální síle (podélné nebo příčné) nebo zda je vyšší.
- Jak se změní stav pneumatiky, když se zvětší svislé zatížení kola nebo když např. se zvětší skluz pneumatiky. Jak se zmenší boční síla vyvozená pneumatikou, když se zvětší podélná síla, atd. Rovněž je možné vzájemně porovnat stav pneumatik.
Dalším příkladem výstupů může být analýza zatížení jednotlivých kol. Program poskytuje přehledné grafy poskytující názornou informaci o tom, kolik procent z celkového zatížení kola odpovídá jednotlivým zdrojům zatížení: pružině, stabilizátoru, tlumiči, tíze samotného závěsu, aerodynamickému přítlaku. Program poskytuje další přehledné výstupy zachycující okamžitý stav diferenciálů, skládaných svazků pružin, atd. Výstupem jsou i další veličiny definované v normě ISO nebo SAE.
Autor software: Ing. Petr Porteš, Ph.D.
Charakteristika
Modely sestavené v prostředí Matab/Simulink+Simmechanics
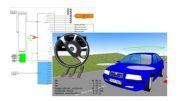 Simulační modely vozidel od nejjednodušších až po složité. Jedná se o následující modely: jednostopý bez podélné dynamiky, jednostopý s podélnou dynamikou, model s konstantní osou klopení (s konstantní polohou středů klopení náprav), detailní model včetně detailních modelů zavěšení kol, mechanismu odpružení, různých typů kloubů hnacích hřídelí, samosvorných nápravových a mezinápravových diferenciálů, modelů kontaktu kola s vozovkou a modelů pneumatik včetně přechodových vlastností. Modely jsou sestavovány s využitím knihoven subsystémů vozidel. Simulační modely vozidel od nejjednodušších až po složité. Jedná se o následující modely: jednostopý bez podélné dynamiky, jednostopý s podélnou dynamikou, model s konstantní osou klopení (s konstantní polohou středů klopení náprav), detailní model včetně detailních modelů zavěšení kol, mechanismu odpružení, různých typů kloubů hnacích hřídelí, samosvorných nápravových a mezinápravových diferenciálů, modelů kontaktu kola s vozovkou a modelů pneumatik včetně přechodových vlastností. Modely jsou sestavovány s využitím knihoven subsystémů vozidel.
Data Analysis
Jedná se o systém procedur a uživatelského prostředí vytvořeného v software Matlab pro analýzu dat získaných z měření na vozidle a/nebo ze simulačních výpočtů. Využití software Matlab umožňuje kombinovat práci ve vytvořeném uživatelském prostředí modulu Data Analysis během obvyklých úkonů a nestandardní úkony provádět přímo v základním prostředí software Matlab. Tím je zajištěna univerzálnost modulu.
Vytvářené prostředky jsou určeny k analýze jízdního stylu řidiče, jeho úkonů během jízdy a k analýze jízdních vlastností vozu. Vytvořené prostředí je rovněž určeno k analýze výstupů ze simulačních výpočtů.
 Modul umožňuje filtraci dat, různá zobrazení dat v různých grafických oknech, podporuje synchronizovaný pohyb kurzoru ve více oknech. Dále tento modul poskytuje prostředky pro speciální analýzy dat, v rámci nichž automaticky vyhledává speciální událostí (např. okamžiky kde se vozidlo chovalo neotáčivě nebo přetáčivě, kde byl motor v režimu omezovače otáček, …) a vytváří grafická okna s odpovídajícími informacemi pro uživatele. V případě analýz zaměřených na subkomponenty vozidla software kombinuje měřená nebo simulovaná data s matematickými modely, vytváří grafická okna poskytující informaci o stavu subkomponety v analyzovaném okamžiku. Pro jízdní zkoušky prováděné podle norem ISO v oblasti jízdní dynamiky automaticky vyhodnotí zkoušky, vypočte veličiny a charakteristiky definované v normě a zobrazí průběh vypočtených veličin a charakteristických hodnot v grafickém okně. Modul umožňuje filtraci dat, různá zobrazení dat v různých grafických oknech, podporuje synchronizovaný pohyb kurzoru ve více oknech. Dále tento modul poskytuje prostředky pro speciální analýzy dat, v rámci nichž automaticky vyhledává speciální událostí (např. okamžiky kde se vozidlo chovalo neotáčivě nebo přetáčivě, kde byl motor v režimu omezovače otáček, …) a vytváří grafická okna s odpovídajícími informacemi pro uživatele. V případě analýz zaměřených na subkomponenty vozidla software kombinuje měřená nebo simulovaná data s matematickými modely, vytváří grafická okna poskytující informaci o stavu subkomponety v analyzovaném okamžiku. Pro jízdní zkoušky prováděné podle norem ISO v oblasti jízdní dynamiky automaticky vyhodnotí zkoušky, vypočte veličiny a charakteristiky definované v normě a zobrazí průběh vypočtených veličin a charakteristických hodnot v grafickém okně.
Software na základě měřeného bočního zrychlení, rychlosti a případně i stáčivé rychlosti generuje profil okruhu nebo jízdní dráhy a automaticky rozdělí dráhu na segmenty odpovídající přímé jízdě (rovným úsekům) a zatáčkám. V případě, že jsou pomocí GPS měřené geodetické souřadnice, jsou tyto souřadnice převedeny do pravoúhlého lokálního tangencionálního souřadného systému. K analýze jízdní dráhy a k vytvoření modelu trajektorie je možné použít speciální modul Trajektorie, který je integrován do tohoto modulu.
Uživatelské prostředí podporuje tvorbu poznámek pevně přiřazených, buď k časovým údajům, nebo k místům na jízdní dráze. Podporuje tvorbu zpráv (exportem poznámek a výstupů z analýz do textového souboru nebo Excelu). Velká pozornost je věnována vizualizaci dat. Originálním způsobem, doposud nepoužitým, zobrazuje data kolem jízdní trajektorie a tím poskytuje velmi přehledně informace pro řidiče i pro testovací inženýry.
Autor modulu: Ing. Petr Porteš, Ph.D.
Charakteristika
Trajectory
 Modul je určen pro popis trajektorie vozu. Vozovka je popsaná pomocí geometrických segmentů složených z přímých úseků (přímek), kruhových oblouků a spirál. To umožňuje popsat trajektorii pomocí malého množství parametrů. Modul slouží k navádění automobilu při simulaci manévrů v uzavřené smyčce (close-loop manoeuvres). Dále je modul využitelný pro plánování jízdní trajektorie, rychlostí, zrychlení, atd. během testu, k popisu trati a včetně poznámek pro řidiče a testovací inženýry. Modul je doplněn o interaktivní prostředí pro rychlou tvorbu trajektorie využitím záznamů ze senzoru GPS, pro tvorbu nové trajektorie. Připravujeme rozšíření možností prostřední na tvorbu trajektorie z map. Modul je určen pro popis trajektorie vozu. Vozovka je popsaná pomocí geometrických segmentů složených z přímých úseků (přímek), kruhových oblouků a spirál. To umožňuje popsat trajektorii pomocí malého množství parametrů. Modul slouží k navádění automobilu při simulaci manévrů v uzavřené smyčce (close-loop manoeuvres). Dále je modul využitelný pro plánování jízdní trajektorie, rychlostí, zrychlení, atd. během testu, k popisu trati a včetně poznámek pro řidiče a testovací inženýry. Modul je doplněn o interaktivní prostředí pro rychlou tvorbu trajektorie využitím záznamů ze senzoru GPS, pro tvorbu nové trajektorie. Připravujeme rozšíření možností prostřední na tvorbu trajektorie z map.
Autor software: Ing. Petr Porteš, Ph.D.
Charakteristika
|



